
Variable Gravity Space Station Prototype and Testbed
The present human exploration focus on missions to the Moon and Mars is diverting attention away from the need to begin work on a successor to the International Space Station. ISS is likely to be terminated later this decade and an international debate on what should succeed it is overdue. This debate should be informed by exploratory studies that examine different approaches to its design, financing and operation in an international context that is similar to ISS. These studies should begin now.
A strong case can be made that the successor to ISS should be a variable gravity design that is capable of offering a range of simulated gravitational environments. The concept in progress presented here envisages a near-full-scale variable gravity prototype and testbed as a first and vital step. Its purpose is to demonstrate and validate many of the advanced technologies needed to operate a revolving variable gravity space station. These include attitude control, orbital orientation, angular velocity control, teleoperation, structural performance, dynamic behaviour, deployment sequencing and docking/berthing procedures.
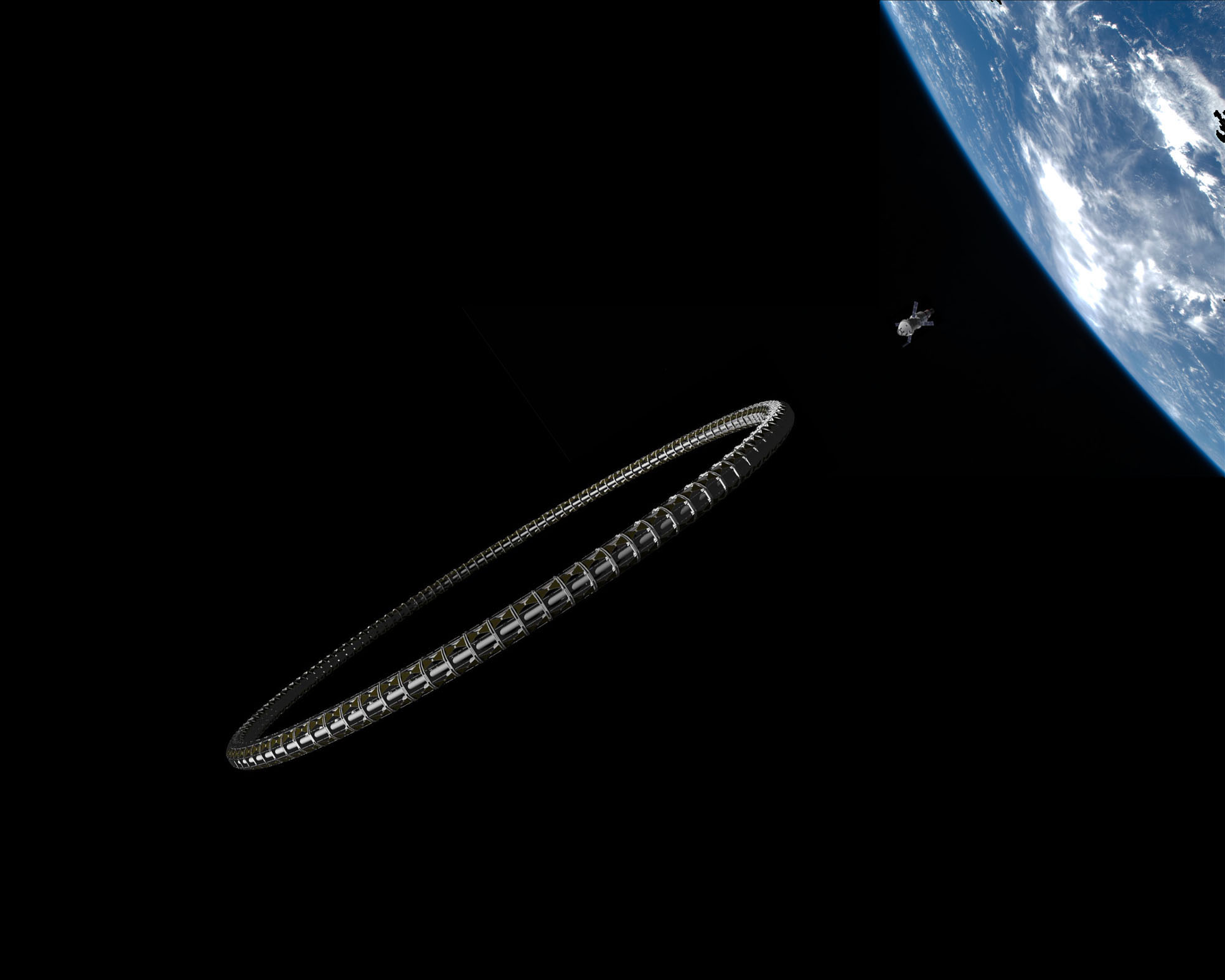
The design resembles a giant ‘hula-hoop’ with a diameter of about 220 metres. It adjusts its spin rate to simulate different gravity modes including Earth gravity, 0.38g of Mars, 0.17g of the Moon, and microgravity. Its rotational motive force poses a challenge but could utilize solar electric propulsion if that technology becomes feasible for use with large space structures. Changes of angular velocity would be very gradual to keep accelerations and decelerations low, taking days or even weeks to transfer from one gravity mode to another.
The toroidal structure is built from prefabricated segments configured as six compact payloads for delivery by a launch vehicle with a payload mass and size capability equivalent to that of the SpaceX Starship. Each payload is essentially a spacecraft in its own right with built-in propulsion, guidance, navigation and control, enabling it to manoeuvre to and rendezvous with the assembly site on orbit. An arriving segment either autonomously docks with a segment already in place or berths to it using a teleoperated arm at the berthing interface. It is anticipated that the torus is assembled in two crescent-shaped halves of 180° that connect end-to-end to form the complete torus. Visiting crewed spacecraft are able to rendezvous with the torus at any point on its circumference during its microgravity mode when there is no rotational spin.
Project Year
2020 onwards
Design
David Nixon PhD RIBA FRAS
Credits
Image: David Nixon
{kind=link}